



AUTOGUIDING:
This article contains some generic principles for successful auto-guiding but is written specifically to provide a few pointers to users of the Cgem mount and imaging equipment similar to what I am using. Like all my writings this is not intended to be of a technical nature but more of a guide as to what worked for me.
We are not all fortunate to own high-end mounts able to produce flawless sub-frames of long exposures even without auto guiding. The Cgem, although not in that class, is very capable of achieving near flawless sub-frames of 300 seconds and more if you apply a few important principles
For a number of years I have imaged with the mount on a tripod but recently mounted the Cgem on a pier. The most important elements I have identified to do successful auto-guiding were the following:
1 Mounting the Cgem on a pier has made a huge difference. Successful long exposure imaging is simply not possible if you start from a base that is not absolutely rigid.
2 All the professional articles say do not overtax the mount. We all know this but we still hang on more stuff in spite of this. The servo motors are unable to efficiently overcome the inertia of the excess weight and auto-guiding cannot fully compensate for this even on a well-balanced mount. My Cgem is an example of a mount that is not quite smooth and as a consequence not easy to balance. Maybe I will come winter pull it apart and see if it can be improved. In spite of this pleasing results have been possible.
3 A 200 mm finder scope is an excellent substitute for other conventional guide scopes and weighs a fraction of those scopes.
4 My imaging scope is an 8 inch RC with a carbon fiber tube. This scope weighs less than the 6 inch metal tube RC I used in the past. The total weight that I hang on the mount including the Atik 460 ex, focal reducer, guide cam and filter wheel is less than 9kg, way below the 18kg stated capacity of the mount.
5 Perfect balance in all the axis. The balancing points change quite dramatically when you for example replace the Atik with a Canon piggy-backed on the RC. I have marked these points on the counter weight shaft as well as on the RC top mounting rail depending on what lens I use as not to disengage the clutches disturbing the mount when rebalancing.
6 Perfect polar alignment. Having perfect alignment ensures the minimum of corrections by the autoguider in both Declination and RA. I have found that the polar alignment application on the Cgem results in sufficiently accurate alignment with the proviso that you remain consistent in how you center and align the polar alignment star utilized. PHD 2 has a very neat and simple to use drift alignment routine. I have tested this and it certainly results in a more accurate alignment but in real life I found no meaningful improvement in the guiding results using this routine in comparison to using the Cgem’s inbuilt alignment routine.
After using PHD 2 for a while I have reverted back to PHD1 as I have found no real improvement in my guiding and I have experienced some issues with the Imaging Source cam I am using for guiding. For some reason that I have as yet not been able to fathom the guide star gets ‘lost’ more often and longer guide star exposures as well as a higher gain setting in comparison to PHD 1 is required.
7 Cable drag is such a simple thing to prevent but happens unnoticed as the mount moves to more extreme angles as the earth rotates. The guide scope and its cam must be fixed to the main scope in such a way as to ensure that there is no possible movement whilst imaging. The guide cam cable as well as all the other cables should not create drag on the mount. Both these factors will ruin the subs and will in all probability only be noticed once processing starts.
8 Seeing, the stability of the atmosphere, is the one factor beyond our control that can severely impact auto-guiding. I am blessed to be imaging from a location with very dark skies and excellent transparency but alas the seeing is not often great. After many hours of trying to change settings to address poor seeing (guide star constantly moving and bloating and shrinking) I have come to the conclusion that on nights of poor seeing it is best to do something else or to switch to wide-field imaging where the short focal length does not show up the effects of ‘chased seeing’ to the same extent. Under poor seeing conditions it does help to extend the time between corrections to about 3 seconds from the standard 1.5 seconds I use. Accurate polar alignment will help as well so as to limit the frequency and duration of the corrections. The bottom line though is that if the seeing is poor, the sub frames will be of a substandard quality and the refraction spikes will not be sharp. Some of this can be improved in the processing but for me all this additional effort detracts from the enjoyment and simply leads to frustrated evenings with little to show for the effort.
Auto guiding Settings
I use PHD software for guiding that can be downloaded free from http://www.stark-labs.com/phdguiding.html . The application is connected through a GPUSB and the auto guide port on the mount. This piece of hardware is available from http://www.store.shoestringastronomy.com/ and this is the device that sends the instructions from PHD to the CGEM mount in the ASCOM standard.
Start off with the default Brain settings and then adjust depending on how your mount responds. My mount performed best with a RA aggressive setting of 85 and RAhys of 10. Dec guiding set at Auto. If you find that the calibration takes more than 25 steps in each of the directions, up the duration of the calibration steps. This setting is dependent on the focal length of your guide-scope. With a longer focal length guide-scope the calibration setting will be less aggressive than on the short finder scope guide-scope I use. There is unfortunately not a magic formula as no mount has the same amount of backlash and you will only find settings that work for your mount by experimenting. The auto guide rates on the mount are the default settings and I have not had reason to adjust those. I advise against doing so as the sudden correction for backlash compensation will certainly ruin the subframe.
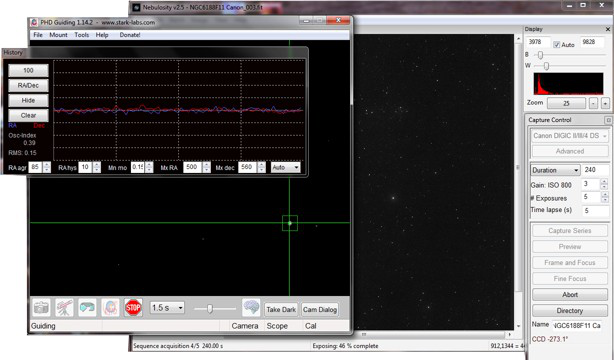
This Screen dump was taken of PHD and the acquisition software Nebulosity http://www.stark-labs.com/nebulosity.html on a night of good seeing. All the elements that I have found to influence successful auto guiding and have mentioned above are in play and the resulting image will be of a good quality.
A final note on the duration of the sub-frames exposure duration: The longer the exposure, obviously the more chance there is of something going wrong with the guiding. I limit my exposures to a maximum of 300 seconds on a night of even good seeing and this only for really faint targets like the Rosetta Nebula. The sensitivity of the Atik 460 EX and its low noise results that even for narrow band filters the amount of data collected is sufficient to produce good images provided that a fair number are taken and stacked. The digital development routine in the image processing ability of Nebulosity is able to enhance the detail contained in even faint images to an amazing level.
On most other Nebulae, 180 to 240 second sub frames are sufficient and on Galaxies I seldom go beyond 90 seconds. Granted I will never attain the quality produced by the professionals but then my equipment costs a fraction of theirs. As I have stated on the front-page of my Website I image within the capabilities of my equipment and within those capabilities produce the best that is possible.
The unfortunate thing about astro-imaging is that the quality of the images do not increase in direct proportion to the money spent. You reach a stage quite quickly where it takes a huge expense to get only a marginal improvement in quality.
Feel free to contact me by e-mail if you require any clarification or feel the need to add to the above. Clear skies, good seeing, good transparency and good guiding!
Post Script:
I did eventually hyper tune the Cgem by polishing the drive gears and replacing the bearings in all axis. This certainly made balancing the mount easier, the guiding did improve somewhat so it was worth the effort as hyper tuning helped the mount to perform to its maximum ability but I still longed for better performance. As a result I have since replaced the Cgem mount with an iOptron Cem 60 mount. In comparison to the Cgem this mount is in a different class all together, but so is the price and you usually get what you pay for. When drift aligned to the Celestial pole and under good seeing the mount delivers superb subframes without any of the challenges I endured with the Cgem, a worthwhile investment in astro-imaging in my opinion. As a result of the improved payload I am now able to piggy back the Altair 66mm refractor, which is quite a heavy scope, without any deterioration in guiding. I now use PHD2 exclusively with the Cem 60. PHD has evolved over the years and PHD2 is vastly superior to the old generation PHD. It certainly performs better on the CEM 60 than on the Cgem but this is probably a result of the superior mount. PHD still works fine with the modified SLT mount.